Triangles and Z-Buffering

引言
GAMES101现代图形学入门是由闫令琪老师教授。本次作业主要是关于三角形的光栅化。
大家好,GAMES101 Spring 2021 课程作业二现在发布!
在课程中段,我们会为同学们开启补提交通道。
SmartChair链接百度云链接 密码:34pc
请大家根据网络环境自行下载。
总览
在上次作业中,虽然我们在屏幕上画出一个线框三角形,但这看起来并不是 那么的有趣。所以这一次我们继续推进一步——在屏幕上画出一个实心三角形, 换言之,栅格化一个三角形。上一次作业中,在视口变化之后,我们调用了函数 rasterize_wireframe(const Triangle& t)。但这一次,你需要自己填写并调用函数 rasterize_triangle(const Triangle& t)。
该函数的内部工作流程如下:
- 创建三角形的 2 维 bounding box。
- 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中心的屏幕空间坐标来检查中心点是否在三角形内。
- 如果在内部,则将其位置处的插值深度值 (interpolated depth value) 与深度缓冲区 (depth buffer) 中的相应值进行比较。
- 如果当前点更靠近相机,请设置像素颜色并更新深度缓冲区 (depth buffer)。
你需要修改的函数如下:
rasterize_triangle(): 执行三角形栅格化算法static bool insideTriangle(): 测试点是否在三角形内。你可以修改此函数的定义,这意味着,你可以按照自己的方式更新返回类型或函数参数。
因为我们只知道三角形三个顶点处的深度值,所以对于三角形内部的像素,我们需要用插值的方法得到其深度值。我们已经为你处理好了这一部分,因为有关这方面的内容尚未在课程中涉及。插值的深度值被储存在变量 z_interpolated 中。
请注意我们是如何初始化 depth buffer 和注意 z values 的符号。为了方便 同学们写代码,我们将 z 进行了反转,保证都是正数,并且越大表示离视点越远。
在此次作业中,你无需处理旋转变换,只需为模型变换返回一个单位矩阵。最后,我们提供了两个 hard-coded 三角形来测试你的实现,如果程序实现正确,你将看到如下所示的输出图像:

开始编写
在你自己的计算机或虚拟机上下载并使用我们更新的框架代码。你会注意到, 在 main.cpp 下的 get_projection_matrix() 函数是空的。请复制粘贴你在第一次作业中的实现来填充该函数。
评分与提交
评分
[5 分] 正确地提交所有必须的文件,且代码能够编译运行。
[20 分] 正确实现三角形栅格化算法。
[10 分] 正确测试点是否在三角形内。
[10 分] 正确实现 z-buffer 算法, 将三角形按顺序画在屏幕上。
[提高项 5 分] 用 super-sampling 处理 Anti-aliasing : 你可能会注意 到,当我们放大图像时,图像边缘会有锯齿感。我们可以用 super-sampling 来解决这个问题,即对每个像素进行 2 * 2 采样,并比较前后的结果 (这里 并不需要考虑像素与像素间的样本复用)。需要注意的点有,对于像素内的每 一个样本都需要维护它自己的深度值,即每一个像素都需要维护一个 sample list。最后,如果你实现正确的话,你得到的三角形不应该有不正常的黑边。
[-2 分] 惩罚分数:
未删除 /build、/.vscode、Assignment2.pdf 等与代码无关的文件。 未提交或未按要求完成 README.md。
代码相关文件和 README.md 文件不在你提交的文件夹下的第一层。
提交
当你完成作业后,请清理你的项目,记得在你的文件夹中包含 CMakeLists.txt
和所有的程序文件 (无论是否修改)。同时,请提交一份实验结果的图片与添加一 个 README.md 文件写下是否完成提高题 (如果完成了,也请同时提交一份结果 图片),并简要描述你在各个函数中实现的功能。最后,将上述内容打包,并用“姓 名 Homework2.zip”的命名方式提交到 SmartChair 平台。
平台链接:http://www.smartchair.org/GAMES101-Spring2021/。
实现
代码框架
1 | // clang-format off |
投影函数
首先填写上次作业在 main.cpp 下的 get_projection_matrix() 函数:
1 | Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar) |
需要注意的是修复了上次作业的倒立问题。
包围盒边界
对于每个三角形,我们对其顶点的 x 与 y 值进行遍历,并找出minX、maxX、minY 以及 maxY。
由于顶点坐标是浮点型,为了不丢失信息,对于”min”值,bounding box的边界进行向下取整;对于”max”值,bounding box的边界进行向上取整:
1 | int minX = std::floor(std::min(v[0][0], std::min(v[1][0], v[2][0]))); |
判断函数

对于是否在三角形内的判别,我们使用向量叉积。在向量叉积中我们提到如何判断左右侧。我们有一个三角形 $\bigtriangleup {P_0P_1P_2}$,判断点$Q$是否在三角形内。例如我们可以通过$\vec{P_1P_2} \times \vec{P_1Q}$,根据右手定则叉乘方向向屏幕外侧,所以$Q$在$P_1P_2$的左侧;同理$\vec{P_0P_1} \times \vec{P_0Q}$,得到的结果仍然在屏幕外侧,$Q$在$P_0P_1$的左侧;在我们判断$\vec{P_2P_0} \times \vec{P_2Q}$时,得到的结果是一个向里的向量,所以$Q$在$P_2P_0$的右侧,它不在三角形内部。
说了这么多,总结起来就是三个叉积向量(叉积时注意顺序)必须同向,向量两两对应做叉积,只要叉积结果符号均相同,则说明判断点在三角形内部。转换为公式为:
$$
sameDirection(P_0P_1 \times P_0Q) = sameDirection(P_1P_2 \times P_1Q) = sameDirection(P_2P_0 \times P_2Q)
$$
之后就是把思路转换为代码了,分别表示出点和向量,一步步做运算,注意先补阶数:
1 | static bool insideTriangle(int x, int y, const Vector3f* _v) |
网上许多的判定方法同向没有考虑三者都为负的情况,不知道为什么。我觉得自己写的这个函数很清楚,便于理解。
插值函数
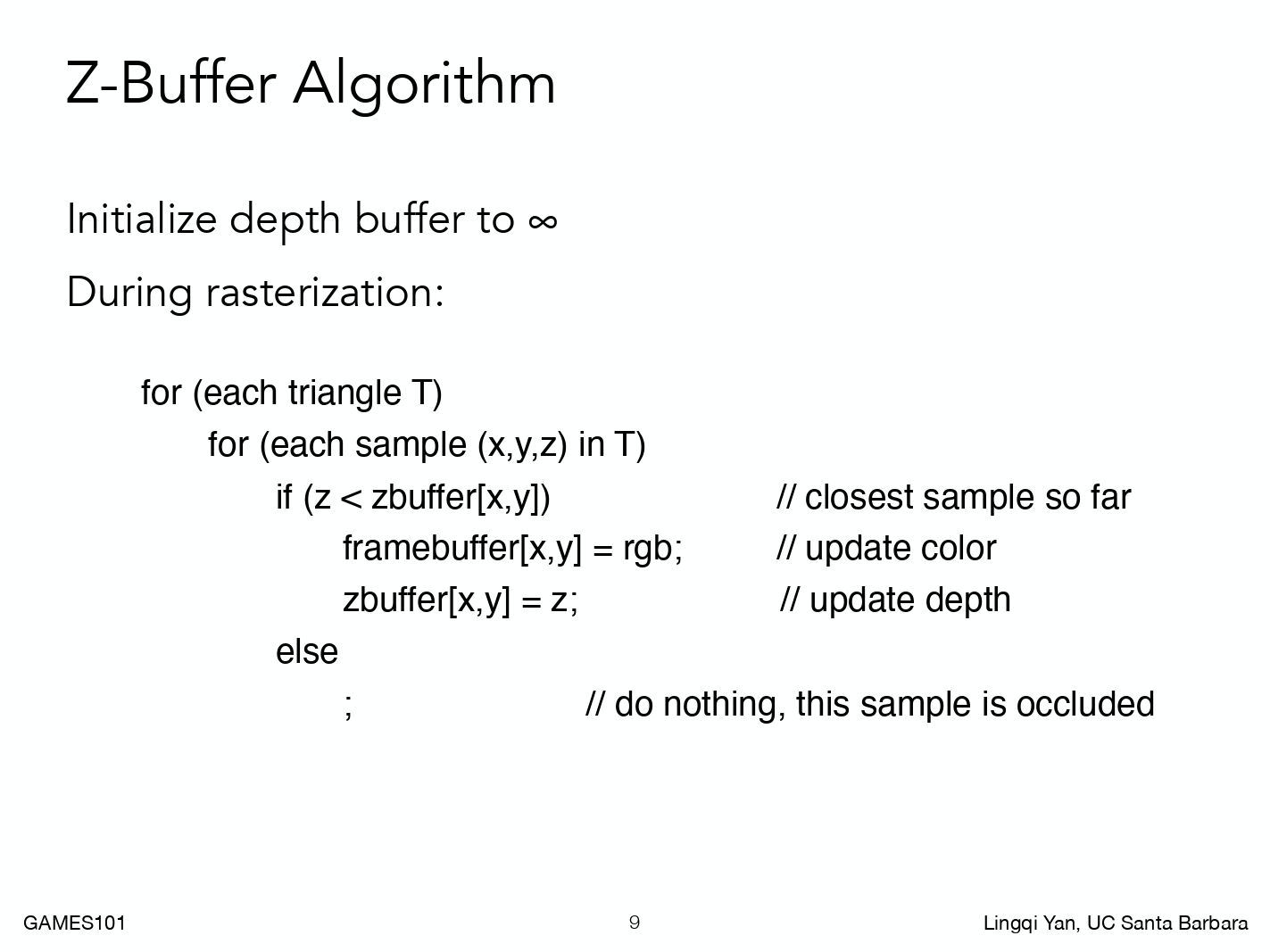
1 | for (each triangle T) |
用两层循环来遍历bounding box的所有点。我们需要判断当前点是否被包含在三角形内部,如果包含,则对它进行着色:
1 | void rst::rasterizer::rasterize_triangle(const Triangle& t) { |
只要点在三角形内部,我们马上对当前点的深度进行插值计算:
1 | for (int x = minX; x <= maxX; ++x) { |
作业框架在此给出了提示,框架这里是 将深度插值和透视除法一起计算的,由于进行了透视除法,所以插值后做了 透视校正,最终得到插值后的该像素的深度。
1 | // 计算重心坐标 |
然后比对该像素深度与 Z-buffer 中该像素的深度(深度测试),如果目前深度比 Z-buffer 中该像素的深度更小(也就是离相机更近),则更新 Z-buffer 中该像素深度:
1 | int buf_index = get_index(x, y); |
最终 rasterizer.cpp 完整代码如下:
1 | // clang-format off |
附加超采样
MSAA 将从四个点是否在三角形内的情况决定颜色和深度:
1 | std::vector<Eigen::Vector2f> pos = { |