Transformation Cont
引言
GAMES101现代图形学入门是由闫令琪老师教授。这节课继续讲解三维变换,并且主要来说相对比较困难的观测变换,包括视图、投影、正交投影以及透视。
3D Transforms
Use homogeneous coordinates again:
• 3D point = $(x, y, z, 1)^T$
• 3D vector = $(x, y, z, 0)^T$
In general, $(x, y, z, w)$ ($w != 0$) is the 3D point:$(x/w,y/w,z/w)$
三维变换只需要拿二维变换作对比即可,并不复杂。
Use 4×4 matrices for affine transformations
$\begin{pmatrix}x’ \\ y’ \\ z’ \\ 1\end{pmatrix} = \begin{pmatrix}a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z \\ 0 & 0 & 0 & 1\end{pmatrix} \cdot \begin{pmatrix}x \\ y \\ z \\ 1\end{pmatrix}$
What’s the order?
Linear Transform first or Translation first?
在之前二维空间的齐次坐标中,我们先应用线性变换,最后再平移,在三维空间也是一样。
Scale:$S(s_x,s_y,s_z)=\begin{pmatrix}s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0\\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1\end{pmatrix}$
Translation:$T(t_x,t_y,t_z)=\begin{pmatrix}1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1\end{pmatrix}$
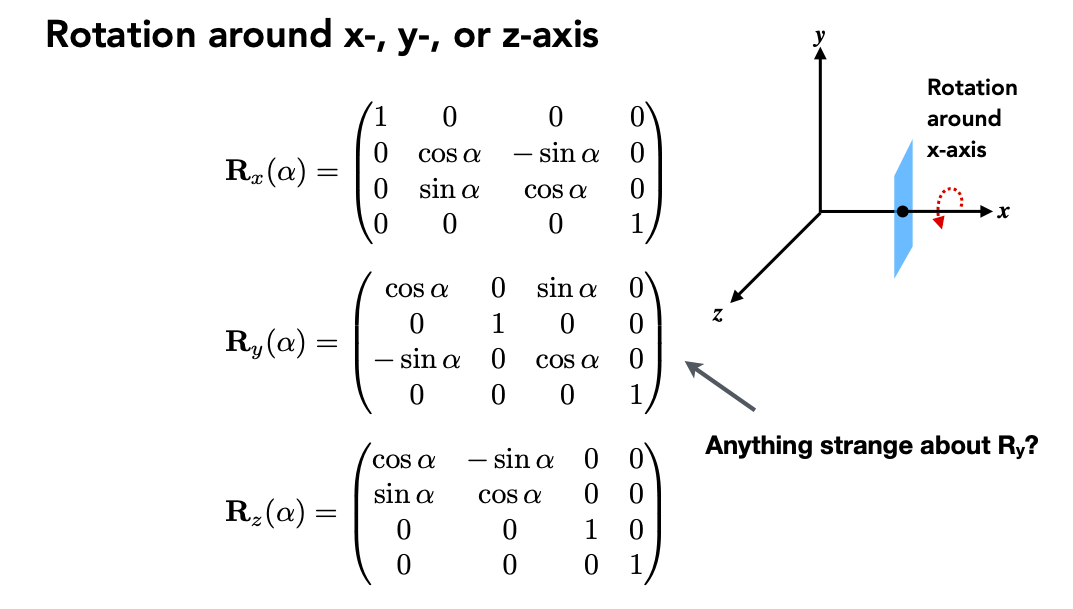
在三维空间中如果我想把一个物体旋转要写出旋转矩阵,比如我们先考虑绕轴旋转(图中为绕x轴旋转),我们可以发现y与z在旋转,而所有的x坐标保持不变,反应在矩阵上就是第一行是$\begin{pmatrix}1 & 0 & 0 & 0\end{pmatrix}$。同样的道理可以运用在y与z轴上。
3D Rotations
Compose any 3D rotation from Rx, Ry, Rz?
$R_{xyz}(\alpha,\beta,\gamma)=R_x(\alpha)R_y(\beta)R_z(\gamma)$
- So-called Euler angles
- Often used in flight simulators: roll, pitch, yaw
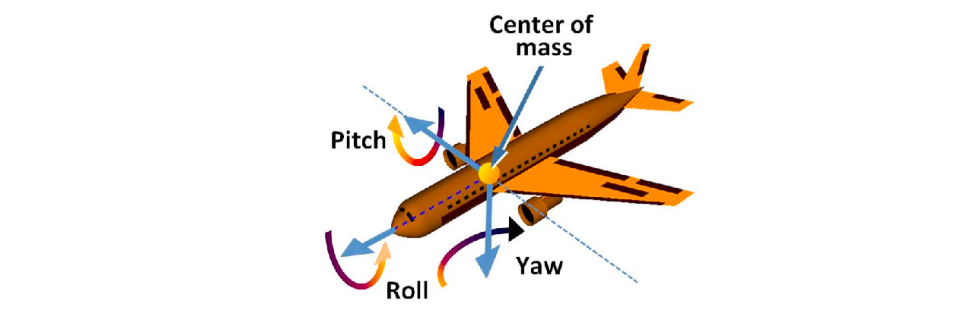
在图形学中我们能够解决简单的问题,对于复杂的问题我们也可以转换为简单的问题的组合。比如这里我不知道如何将任意旋转分解为绕轴旋转,但我们可以先思考能否通过三种绕轴方向旋转实现任意方向的旋转。
上图这三个角被称为欧拉角,我们可以先考虑一下飞机的飞行运动,它可以上下抬头/低头旋转、向左/右平移旋转、侧翼顺/逆时针旋转,通过这么几种不同的旋转飞机当然可以调整到任意一个方向。
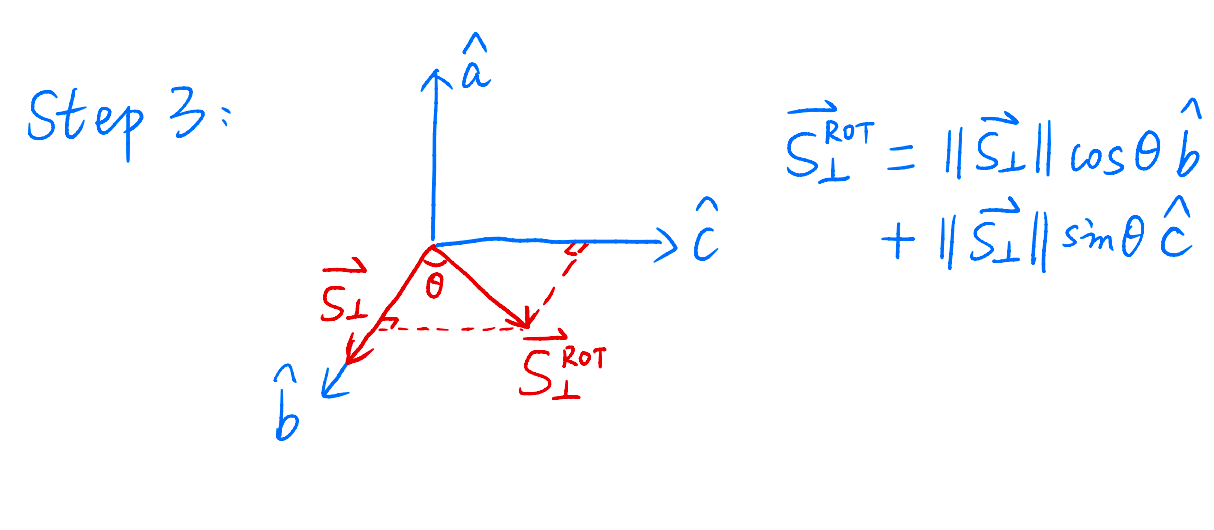
Rodrigues’ Rotation Formula
Rotation by angle α around axis n:
$R(n,\alpha)=\cos{(\alpha)}I+(1-\cos{(\alpha)})nn^T+\sin{(\alpha)}\begin{pmatrix}0 & -n_z & n_y \\ n_z & 0 & -n_x \\ -n_y & n_x & 0\end{pmatrix}$
How to prove this magic formula?
Check out the supplementary material on the course website!
在图形学中就有人发明了一套办法,通过分解为三个方向可以把任意旋转写成这么一个矩阵,也就是罗德里格斯旋转公式。这个旋转公式非常复杂,推导过程如下:
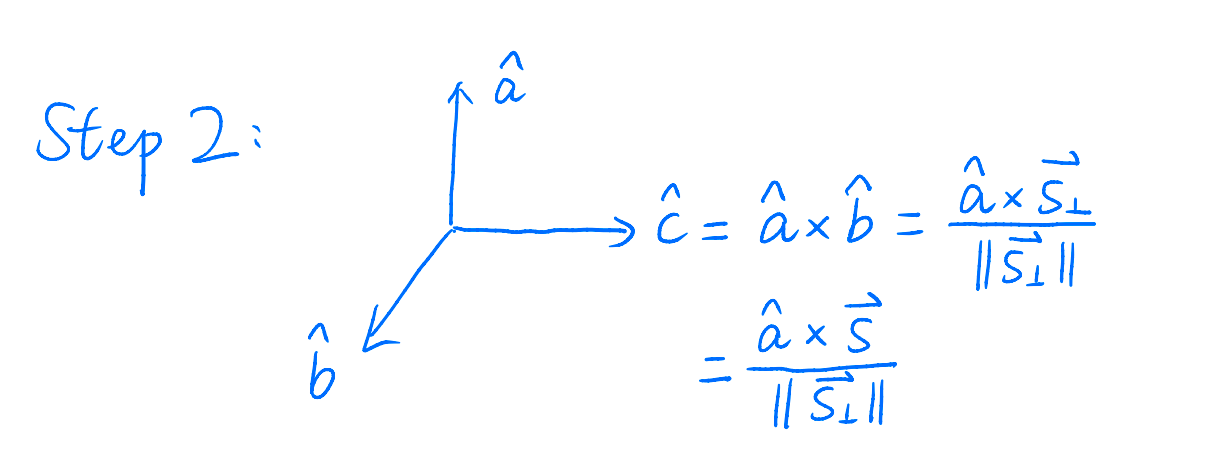
这个旋转公式定义了一个旋转轴和旋转角度,而旋转轴只用一个向量定义不太合理,旋转轴首先要和起点有关系,然后跟它方向有关系。为什么需要一个起点呢?之前我们默认旋转轴过原点,但实际上并不是所有旋转都过原点。
上节课变换的分解中我们提到二维旋转如果要绕任意一个点旋转,我们需要先把中心点平移到原点上,再做旋转,再把它平移回来。在三维空间中是完全相同的做法,如果我们沿任意轴旋转而起点并不为原点,没关系,先把所有的东西都移到使得轴过原点上,然后旋转,最后再把所有东西移回去,问题解决。
View transformation
View/Camera Transformation
What is view transformation?
Think about how to take a photo
- Find a good place and arrange people (model transformation)
- Find a good “angle” to put the camera (view transformation)
- Cheese! (projection transformation)
我们学这些的目的是把三维空间的物体变成二维空间中的照片,这个过程发生了什么我们要弄明白,但这个过程一定涉及了三维到二维的变换。
咱们一开始先说拿到一个场景我要规定场景和相机位置,然后我得到某一个投影出来,否则对于一个三维场景从不同的角度看,看到的一定不同,“怎么看”这个问题很重要。首先什么是视图变换,这里思考一个简单的问题:现实生活中怎么拍一张照片?
- 首先找一个好的地方搭好场景摆好pose(模型变换)
- 第二步找到好的角度/位置将相机放置好(视图变换)
- 下一步是“茄子!”可以拍照(投影变换)
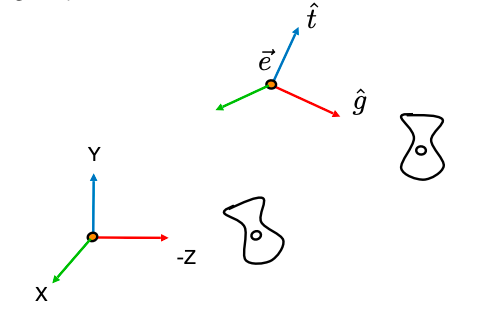
How to perform view transformation?
Define the camera first
Position $\vec e$
Look-at / gaze direction $\hat g$
Up direction $\hat t$
(assuming perp. to look-at)
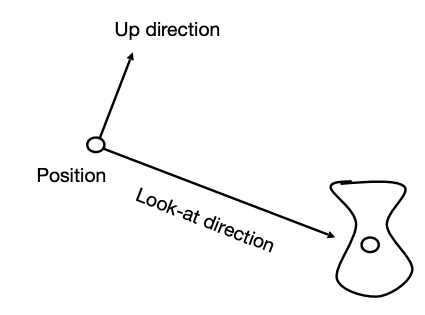
那大家想一想如何确定相机的摆放。首先相机的位置一定非常重要,所以我们要定义它,但只确定位置并没有用,比如大家坐在座位上,头是可以扭动朝不同方向去看的,“往哪儿看”也是非常重要的,这个属性被称为Look-at direction。
只定义方向依然不够,我们还需要一个向上的方向:大家在拍照的时候相机逆时针旋转45度和顺时针旋转45度拍摄出来的照片一定不一样,旋转一定会影响拍出来的图是什么,所以我们用一个向量来定义这个向上的属性值把旋转固定住。到这里我们终于把相机固定在一个位置了。
Key observation
If the camera and all objects move together,
the “photo” will be the same
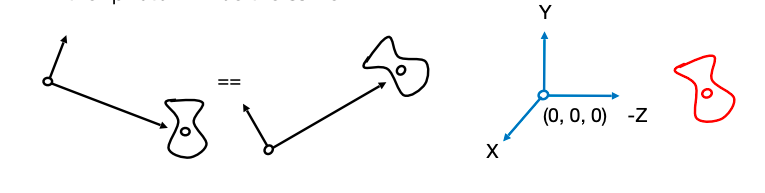
How about that we always transform the camera to
- The origin, up at Y, look at -Z
- And transform the objects along with the camera
下一步我们来想如何进行视图变换,在现实生活中也是这样:大家坐在车上不往窗户外面看,是感觉不到自己在移动,这个在物理上叫相对运动。那么在观察或者说拍照片上也是一个道理,摄影棚里相同的人、相同的相机、相同的摆放位置不管在哪个摄影棚大家拍出来的是一样的,也就是说当相机和包括前景背景所有的东西都一起移动的时候,那么拍出来的这张照片一定是一样的。
我们考虑到这点可以得出只要物体与相机之间没有相对运动,它拍摄的结果是一样的。更进一步思考,我们可以认为相机放置在固定的位置上,所有东西都是其他物体在移动并且相机永远在原点,约定俗成向上朝向y轴指向-z轴。
Transform the camera by $M_{view}$
- So it’s located at the origin, up at Y, look at Z
Mview in math?
- Translates e to origin
- Rotates g to -Z
- Rotates t to Y
- Rotates (g x t) To X
- Difficult to write!
我们要把相机从任意的一种摆放给放到标准位置上去,做一个一一对应。比如相机原本的中点在$\vec e$这个位置,朝向$\hat g$并且上方向是$\hat t$,现在我们需要改成上面以原点为中心的:
- 中心从$\vec e$平移到原点
- 观察方向由$\hat g$旋转到-Z
- 向上方向由$\hat t$旋转到Y
- 将$\hat g \times \hat t$旋转至X
$M_{view}$ in math?
Let’s write $M_{view} = R_{view}T_{view}$
Translate e to origin
$T_{view}=\begin{bmatrix}1 & 0 & 0 & -x_e \\ 0 & 1 & 0 & -y_e \\ 0 & 0 & 1 & -z_e \\ 0 & 0 & 0 & 1\end{bmatrix}$
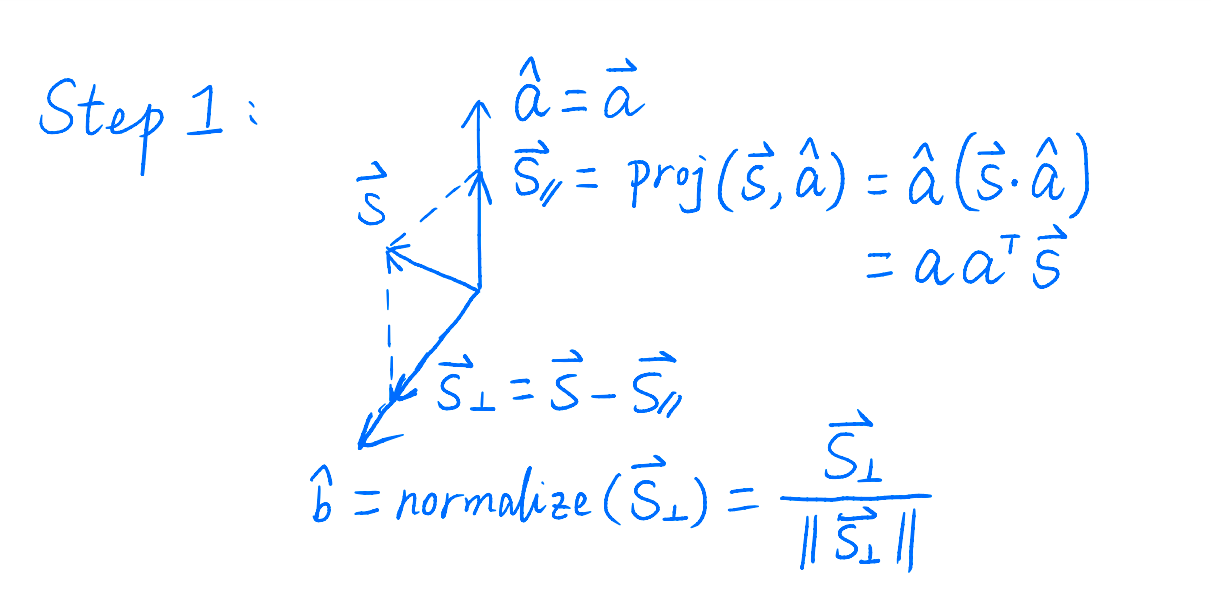
Rotate g to -Z, t to Y, (g x t) To X
Consider its inverse rotation: X to (g x t), Y to t, Z to -g

对于这样一系列的操作我们转换为矩阵形式。旋转矩阵是正交矩阵,所以它的逆是它的转置。
Summary
- Transform objects together with the camera
- Until camera’s at the origin, up at Y, look at -Z
Also known as ModelView Transformation
But why do we need this?
- For projection transformation!
Projection Transformation
Projection in Computer Graphics
- 3D to 2D
- Orthographic projection
- Perspective projection
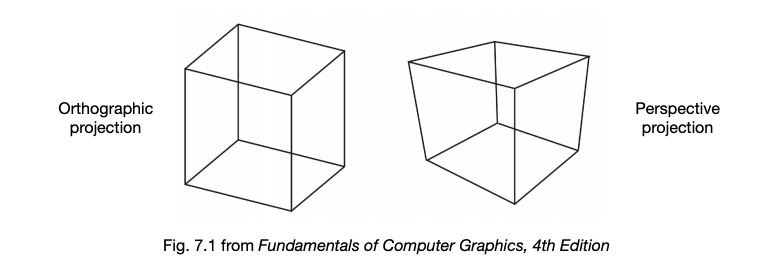
我在看立方体可以看到不同的结果,左边和右边它们两个分别用了两种不同的投影方式。左边这幅图立方体不同的面的平行线依然平行,然而右边这张图就不是了,如果延长两条线它会相交在某个点上。
如果大家学过画画或者素描,人眼的成像更类似右边这种,也就是透视投影。透视投影有一个性质,你会看到平行线不再平行,它们都会相交到某一个地方去。左边的正交投影更多用来工程制图,但它最本质的是不会带来近大远小的现象,而透视投影会有这个现象,成语一叶障目说的就是如此,最近还有一个“道理我都懂,但是鸽子怎么这么大? ”的梗大家可以去搜一下。

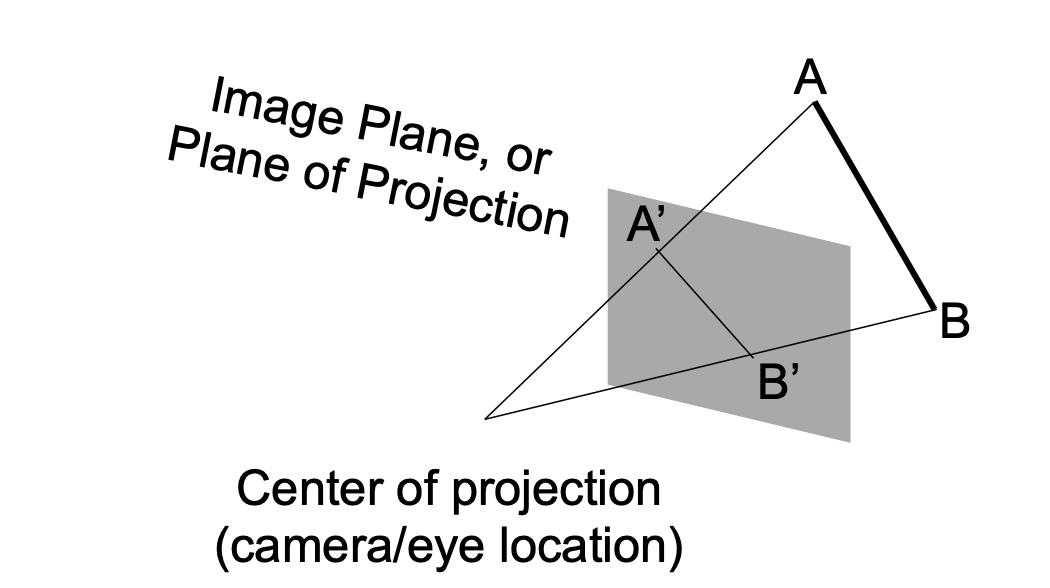
Perspective projection vs. orthographic projection
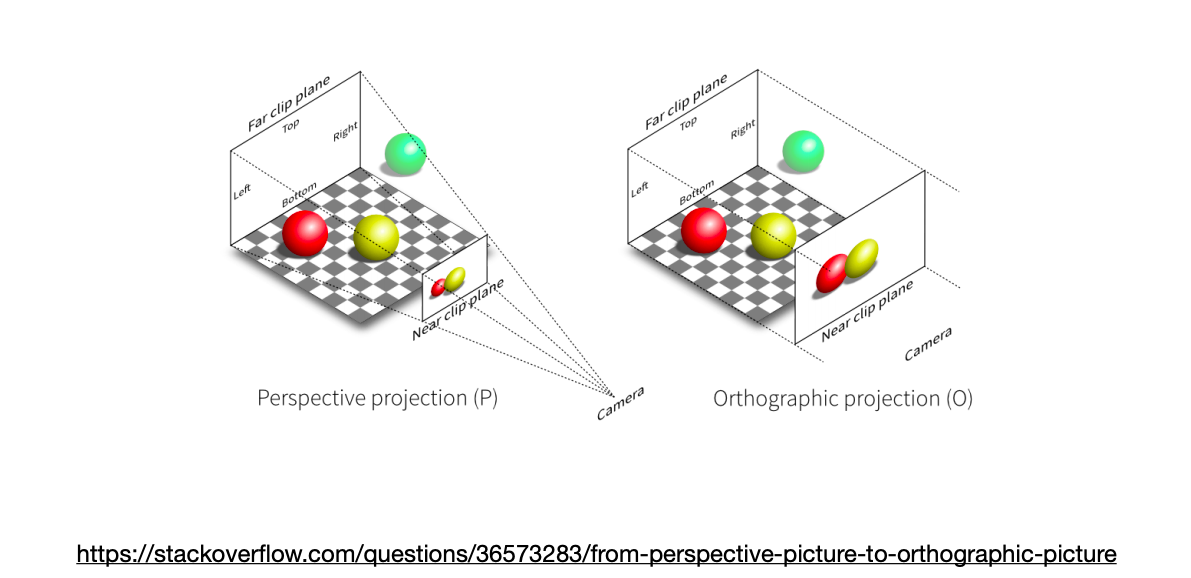
那么我们反应到数学上该怎么说这个事情呢?我们之后会说。这里是两张图解释两种投影,左边就是透视投影,我们认为摄像机放置在某个位置上的一个点,这个点我们在空间中连出一个锥;相应的正交投影假设相机离得无限远,这样相当于近处的平面跟远处的平面就会越来越接近,最后进和远是完全一样的大小,投影出来的就一样了。
Orthographic Projection
A simple way of understanding
- Camera located at origin, looking at -Z, up at Y (looks familiar?)
- Drop Z coordinate
- Translate and scale the resulting rectangle to $[-1, 1]^2$
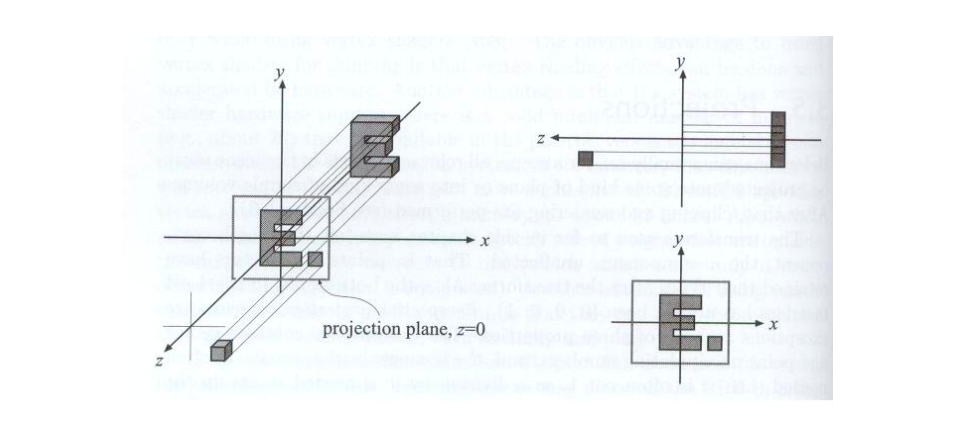
我们从最简单的正交投影开始讲。正交投影就是不管远近挤到一个平面就可以了,首先我们把相机放在一个位置上(看向-Z,向上朝Y),然后这样摆放把z坐标扔掉得到结果自然是xy平面上的图了。
最后不管xy的范围多大,我们都约定俗成把它移到 $[-1, 1]^2$一个小的矩形,得到正交投影的结果。
In general
We want to map a cuboid $[l, r] \times [b, t] \times [f, n]$ to the “canonical (正则、规范、标准)” cube $[-1, 1]^3$Slightly different orders (to the “simple way”)
Center cuboid by translating
Scale into “canonical” cube
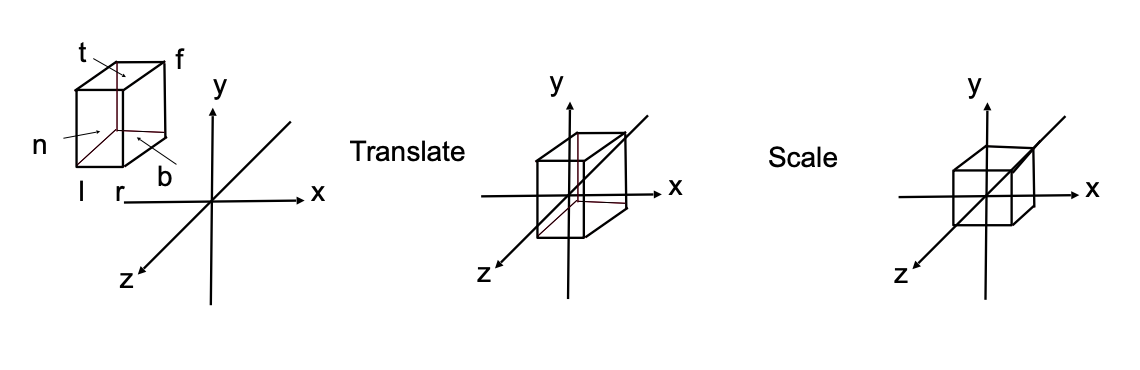
严格的做法是首先我们定义空间中的一个立方体,定义立方体的左右在x轴是多少,下上在y轴上是多少,远近在z轴各占多少。通过这6个数我们把立方体描述出来,然后我们把这样一个形状视图映射到最右图的这个标准立方体。
中间过程如上图所示,我们把立方体中心移到原点,然后把x、y、z轴分别拉成 $[-1, 1]^3$就可以了。特别要说的是和我们之前说的简单的把z轴扔掉是有不一样的地方,多了一个平移;还有一件事是我们看向-Z方向,如果一个面离我们远意味着z值更小,反之越近z值越大。
Transformation matrix?
- Translate (center to origin) first, then scale (length/width/height to 2)
$M_{ortho} = \begin{bmatrix}\frac{2}{r-l} & 0 & 0 & 0 \\ 0 & \frac{2}{t-b} & 0 & 0 \\ 0 & 0 & \frac{2}{n-f} & 0 \\ 0 & 0 & 0 & 1\end{bmatrix}\begin{bmatrix}1 & 0 & 0 & -\frac{r+l}{2} \\ 0 & 1 & 0 & -\frac{t+b}{2} \\ 0 & 0 & 1 & -\frac{n+f}{2} \\ 0 & 0 & 0 & 1\end{bmatrix}$
我们现在需要把这么一个变换用矩阵写成数学形式。首先我们将其中心平移到原点,然后再做一个缩放,把x、y、z的宽度都变成2。对于正交投影非常简单,写成两个矩阵相乘的形式就好了。
Caveat
- Looking at / along -Z is making near and far not intuitive (n > f)
- FYI: that’s why OpenGL (a Graphics API) uses left hand coords.
Perspective Projection
- Most common in Computer Graphics, art, visual system
- Further objects are smaller
- Parallel lines not parallel; converge to single point
透视投影是一种广泛的投影,满足近大远小的性质,它带来的效果是投影到的平行线看上去不再平行。在欧式几何中定义平行线是永不相交,而在下面的照片上却不对:
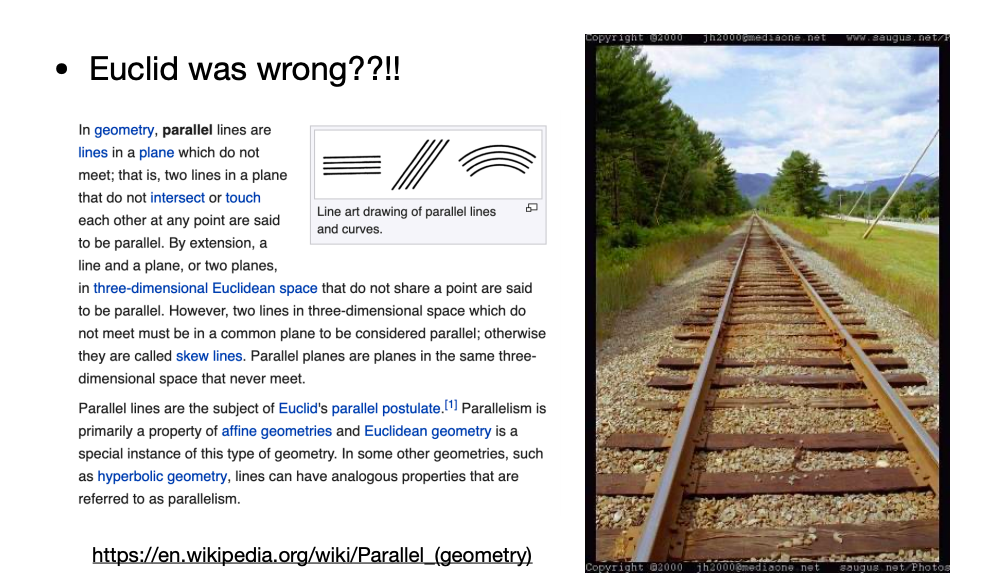
两条铁轨显然是平行的,在照片中不仅是相交的,甚至可以把交点指出来。在同一个平面两条平行线肯定是不会相交的,但如果一个平面被投影到另一个平面上,这个情况下就不是平行线了,这是透视投影带给大家不一样的地方。
Before we move on
Recall: property of homogeneous coordinates
- $(x, y, z, 1), (kx, ky, kz, k != 0), (xz, yz, z^2, z != 0) $ all represent the same point $(x, y, z)$ in 3D
- e.g. $(1, 0, 0, 1)$ and $(2, 0, 0, 2)$ both represent $(1, 0, 0)$
Simple, but useful
在做透视投影时有一些数学基础需要回顾一下。对于齐次坐标而言 $(x, y, z, 1), (kx, ky, kz, k != 0)$ 表示的是相同的,比如$(1,0,0,1)$和$(2,0,0,2)$都代表了$(1,0,0)$这个点,简单却有用。
How to do perspective projection
- First “squish” the frustum into a cuboid (n -> n, f -> f) ($M_{persp \to ortho}$)
- Do orthographic projection ($M_{ortho}$, already known!)
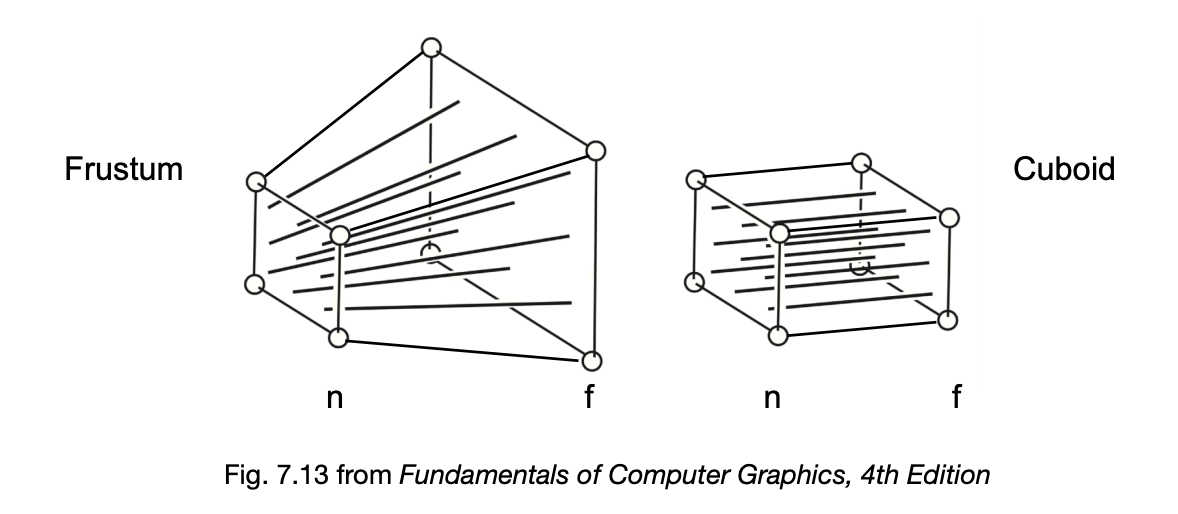
透视投影和平行投影的区别就是这些线从左边投影到右边,那么这给了我们一种思路:可以先把f面与中间的东西挤压到与n相同,再进行正交投影。
正交投影我们已经熟悉了,现在只需要解决挤压。对于挤压的过程我们定义一些事情,首先近平面永远不变,挤压前后不变;远平面的z值不变,就在平面内收缩;对于f面的中心我们也认为不变。
In order to find a transformation
- Recall the key idea: Find the relationship between transformed points (x’, y’, z’) and the original points (x, y, z)
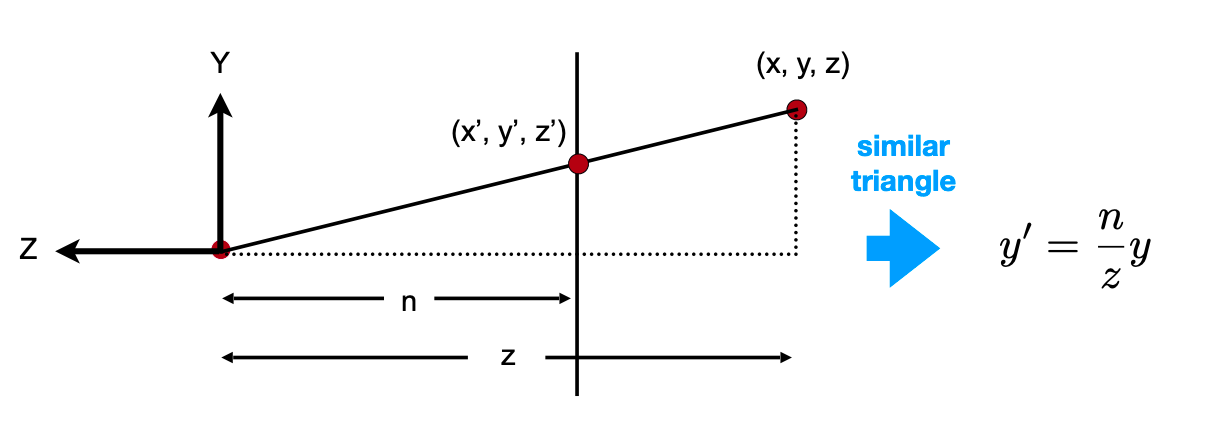
我们假设从侧面向Frustum看,我想知道对于任何一个点$(x,y,z)$,经过挤压之后会如何变换呢?拿出y来看可以发现一个相似三角形,可以得到 $\frac{n}{z} = \frac{y’}{y} \to y’ = \frac{n}{z}y$,也就是任意一点如何被挤压是相对清楚的。
In order to find a transformation
- Find the relationship between transformed points (x’, y’, z’) and the original points (x, y, z)
$y’ = \frac{n}{z}y$ $\space x’ = \frac{n}{z}x$ (similar to y’)
In homogeneous coordinates,
$\begin{pmatrix}x \\ y \\ z \\ 1\end{pmatrix} \to \begin{pmatrix}nx/z \\ ny/z \\ unknown \\ 1\end{pmatrix} == \begin{pmatrix}nx \\ ny \\ still unknown \\ z\end{pmatrix}$
So the “squish” (persp to ortho) projection does this
$M^{(4 \times 4)}_{persp \to ortho} \begin{pmatrix}x \\ y \\ z \\ 1\end{pmatrix} = \begin{pmatrix}nx \\ ny \\ unknown \\ z\end{pmatrix}$
Already good enough to figure out part of $M_{persp->ortho}$
$M_{persp \to ortho} = \begin{pmatrix}n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ ? & ? & ? & ? \\ 0 & 0 & 1 & 0\end{pmatrix}$
通过矩阵运算的性质我们很容易可以推导出$M_{persp \to ortho}$矩阵部分元素(第一、二、四行),我们只剩第三行不知道。
How to figure out the third row of $M_{persp \to ortho}$
- Any information that we can use?
Observation: the third row is responsible for z’
- Any point on the near plane will not change
- Any point’s z on the far plane will not change
在近、远平面上它们的z不变(其他面有可能变化),这就够了。任何一个点在近平面都不会发生变化,远平面虽然x、y会往里挤,但z不发生变化。
Any point on the near plane will not change
$M^{(4 \times 4)}_{persp \to ortho}\begin{pmatrix}x \\ y \\ z \\ 1\end{pmatrix} = \begin{pmatrix}nx \\ ny \\ unknown \\ z\end{pmatrix} \to \begin{pmatrix}x \\ y \\ n \\ 1\end{pmatrix} == \begin{pmatrix}nx \\ ny \\ n^2 \\ n\end{pmatrix}$
So the third row must be of the form (0 0 A B)
$\begin{pmatrix}0 & 0 & A & B\end{pmatrix}\begin{pmatrix}x \\ y \\ n \\ 1\end{pmatrix} = n^2$
利用近平面不变的性质,我们将$unknown$替换为$n$并同时乘上$n$可以得到,并且假设的第三行$(0 \space 0 \space A \space B)$可以得到一个与xy无关的定值$n^2$。
What do we have now?
$\begin{pmatrix}0 & 0 & A & B\end{pmatrix}\begin{pmatrix}x \\ y \\ n \\ 1\end{pmatrix} = n^2 \to An + B = n^2$
Any point’s z on the far plane will not change
$\begin{pmatrix}0 \\ 0 \\ f \\ 1\end{pmatrix} \to \begin{pmatrix}0 \\ 0 \\ f \\ 1\end{pmatrix} == \begin{pmatrix}0 \\ 0 \\ f^2 \\ f\end{pmatrix} \to Af+b=f^2$
远平面同样满足该性质,并且中心点$f$也不会变化,将这两个情况带入矩阵,这样我们就得到了两个联立式子。
Solve for A and B
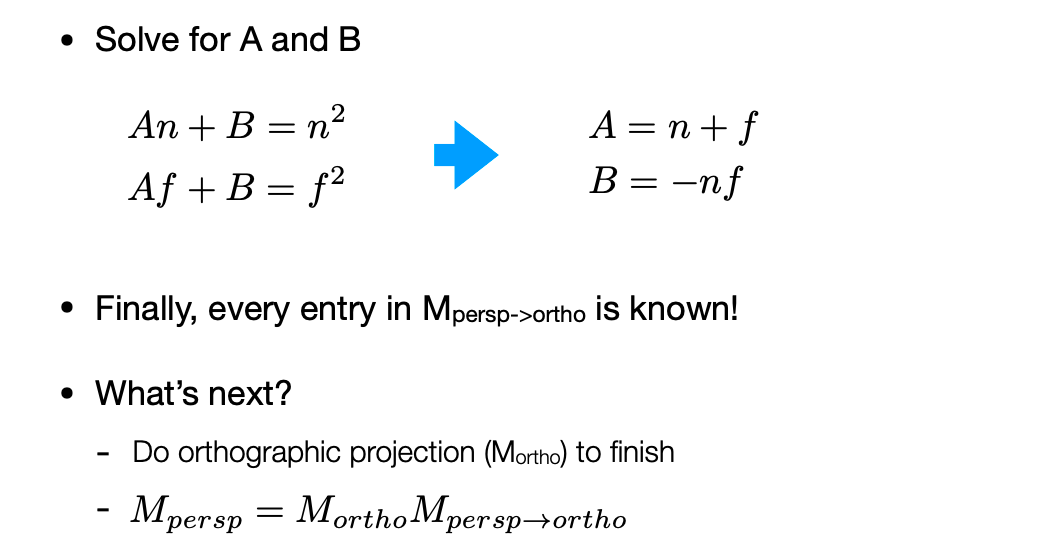
Finally, every entry in $M_{persp \to ortho}$ is known!
What’s next?
- Do orthographic projection (Mortho) to finish
- $M_{persp} = M_{ortho}M_{persp \to ortho}$
通过联立方程我们可以解出$M_{persp \to ortho}$,再做正交投影就可以得到透视投影。